Robotik
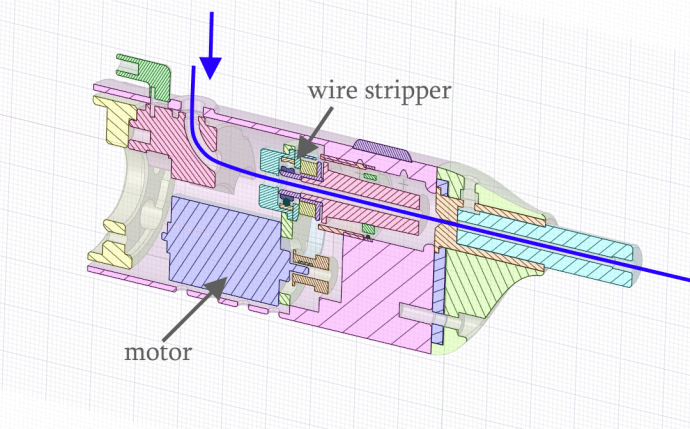
LCM erarbeitet mit seinen Kunden Lösungen auch außerhalb der üblichen Pfade. Wir analysieren den Prozess und demonstrieren mögliche Umsetzungsvarianten mit unserer Ausrüstung. Außerdem entwickeln und fertigen wir passende Werkzeuge (end-of-arm tools) für Roboter.
Vereinbaren Sie jetzt Ihren persönlichen Beratungstermin!


Unsere Dienstleistungen
Design
Wir automatisieren den bestehenden Prozess mit Erfindungsgeist, Konstruktion, Simulation und branchenübergreifender Erfahrung.

Testing
Wir testen das Design und den Ablauf mit automatisierten Simulationen und virtueller Inbetriebnahme.
Operation
Wir überzeugen unsere Kunden mit einem Funktionsmuster/Prototypen für erste Tests in unserem Labor oder direkt vor Ort.
![]()
Finanzierung
Wir überschlagen mit unseren Kunden den Return on Investment (ROI) und unterstützen bei der Suche nach einer geeigneten Finanzierung für das Vorhaben.
Referenzprojekte
Für jede der oben angeführten Dienstleistungen stellen wir hier ein ausgewähltes Beispielprojekt vor. Die umfangreichere Sammlung von Beispielprojekten am Beginn der Seite wird laufend erweitert.
Für die Systemintegration, Inbetriebname, Wartung und Helpdesk empfehlen wir gerne ausgewählte Partner von LCM.
DESIGN – Autonome Müllentsorgung
In Kooperation mit der Firma Brantner arbeitet LCM an einem autonomen Robotersystem mit dem Ziel, volle Abfallbehälter durch leere auszutauschen.
Innerhalb unseres K2-Zentrums „Symbiotic Mechatronics“ unterstützen wir dieses Projekt auf vielfältige Weise. Wir beraten bei bei der Hardwareauswahl, setzen das Abfallbehälterhandling um (Konzeptentwicklung, Entwicklung Greifer und Haltevorrichtungen, Prototyping, Tests) und erstellen ein Konzept für den Gesamtablauf der Mission „Abfallbehältertausch“.
Wir integrieren die Robotersteuerung in die AGV-Steuerung und unterstützen bei der Chassis-Realisierung (Umsetzung Öffnen und Schließen des Chassis für Roboter (Konstruktion Mechanik, Aktorikauswahl), Design: Kunstuniversität Linz). Weiters setzen wir die Datenanbindungen (Füllstandssensorik, Tracker, etc.) und das Monitoring der Entwicklungsplattform um.
Über unser Virtuelle Inbetriebnahme Tool (Industrial Physics) haben wir den Ablauf beim Behälterwechsel simuliert, um die Erreichbarkeit und Kollisionsfreiheit zu überprüfen.
TESTING – Chargiereinrichtung

In einem Projekt mit der Firma Ebner Industrieofenbau wurde die neu entwickelte vollautomatisierte Chargiereinrichtung der Haubenofenanlage HICONSABER mit LCM virtuell in Betrieb genommen.
Hierbei wurde die Software iPhysics der Firma Machineering eingesetzt. Durch die Kopplung mit gängigen CAD-Werkzeugen übernimmt iPhysics die Anlagengeometrie auf Knopfdruck. Anpassungen können ohne Zusatzaufwand durch Nachziehen übernommen werden.
Das Tool iPhysics ermöglicht weiters eine Kopplung mit den Steuerungen aller gängigen Hersteller. Die vorliegende Chargiereinrichtung wurde mit PLCSim Advanced von Siemens gesteuert. Die Anlage wurde in der virtuellen Inbetriebnahme mit derselben HMI-Bedieneransicht gesteuert, die später auch in der Realität eingesetzt wurde.
Die Haubenofenanlage HICONSABER läuft mittlerweile zu vollsten Zufriedenheit beim Kunden. Mit dem erstellten digitalen Zwilling der Anlage können nun in Folgeprojekten Adaptionen und Erweiterungen sowohl in der Konstruktion, als auch in der Software schnell und risikolos überprüft werden und Anlagenbediener geschult werden.
OPERATION – Gewinde nachschneiden
In dieser Machbarkeitsstudie mit Wacker Neuson war die Fragestellung, ob es möglich sei, den bisher manuell mit einem Akkuschrauber durchgeführten Prozess „Gewindenachschneiden“ automatisiert und robust mit einem Roboter umzusetzen.
Wir realisierten ein Funktionsmuster in unserem Labor mit den aktuell verwendeten (und nur leicht adaptierten) Werkzeugen und konnten die grundsätzliche Realisierbarkeit rasch und kostengünstig demonstrieren.
Es wurden dazu unterschiedliche Gewinde in einem Bereich von M8 bis M24 nachgeschnitten, welche durch den Lackierprozess und Korrosion verschmutzt waren.
Die Regelung des Akkuschraubers erfolgte direkt über die Steuerung des Roboters, in der auch die Kraft- bzw. Drehmomentenmessung zur Verfügung steht.
Finanzierung
Besonders für KMUs, die aktuell noch keine Robotik in der Produktion einsetzen, sind die Aufwände oft schwer abzuschätzen. Neben den Kosten für die Machbarkeitsprüfung ist vor allem der Aufwand für die Einführung von Robotik relevant. Die Amortisationsdauer wird beispielsweise mit einer RoI-Rechnung (RoI = Return on Investment) ermittelt.
Für KMUs stehen für diese Projekte und Modernisierungsprozesse zahlreiche (nationale und regionale) Finanzierungsunterstützungen zur Verfügung. Wir beraten gerne gemeinsam mit den Förderstellen.
So wurden vor kurzem Projekte mit 2 Konsortien erfolgreich umgesetzt: ROWA Automation mit Huber Kunststofftechnik und TCM Systems mit RoRa Aviation. Die beiden Projekte werden oben bei den realisierten Anwendungen kurz vorgestellt.
News

LCM nutzte das DIH² short term mobility Programm
DIH² ist ein pan-europäisches Netzwerk von Digital Innovation Hubs für agile Robotik. Unser Kollege Bernhard Uhl nutzte das short-term mobility Programm dieses Netzwerkes, um am Instituto ai2 de la UPV in Valencia ein Indoor-Lokalisierungssystem für human-robot...

Workshop: Virtuelle Inbetriebnahme und Model-Based Design
In einer gemeinsamen Veranstaltung am 4. Mai 2022 in Linz zeigen wir (LCM) gemeinsam mit MathWorks und dem Mechatronik-Cluster, wie modellbasierte Entwicklung und durchgängige Simulation Industrieunternehmen dabei unterstützen, ihr Ziel der digitalen Transformation zu...

LCM bei den Cobot Experience Days 2022
Cobots sind kollaborative Industrieroboter, die mit Menschen zusammenarbeiten. Im Rahmen der Cobot Experience Days (16.-17.3.2022) hat unser Kollege Dr. Johannes Schröck innovative Cobotsanwendungen präsentiert, die am LCM entwickelt wurden und werden. Als Designer...
Downloads
Success Story: „100 % Automation durch maßgeschneidertes Systemdesign“ (Testfuchs Pumpenprüfstand, pdf)
Success Story: Abfallroboter im öffentlichen Raum (Brantner Abfallroboter, pdf)
