Forest track maintenance requires accurate information about the orientation of the agricultural machine in use. Conventional navigation via GPS (global positioning system) allows for the determination of the position and orientation in open land, but requires line of sight to a number of respective satellites. In the woodland, these are mostly not available. LCM has developed a system that provides a good estimate of the orientation outdoors without the use of GPS based on a stereo camera, visual odometry processing of the pictures and sensor fusion with signals given by inertial sensors.
Orientation estimation outdoors without the use of GPS
In forest management, paths frequently need to be created following given directions, hence, the current orientation of the respective agricultural machine must be known. The GPS (global positioning system) is the conventional method to obtain the orientation of a vehicle in the open land which however requires lines of sight between the GPS antennas and several satellites.
In the woodland, these lines of sight are not available most of the time. Therefore, alternative methods are needed for orientation estimation.
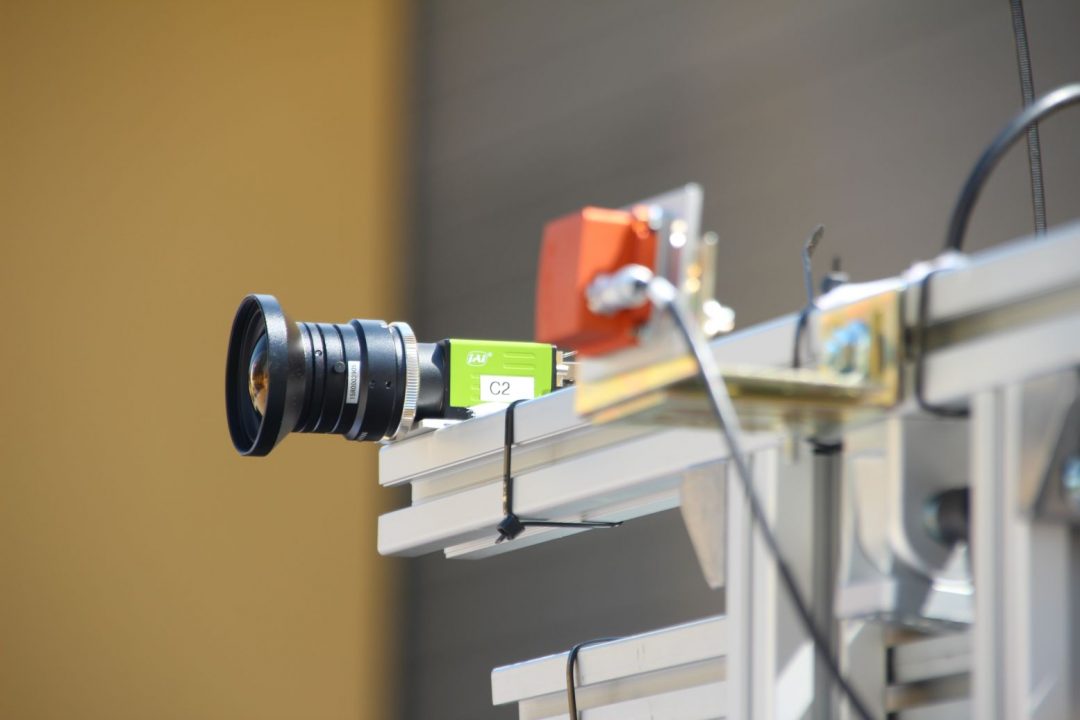
LCM GmbH has evaluated various of these methods. In cooperation with the Institute of Robotics of Johannes-Kepler-University Linz, we have developed a prototype system for orientation estimation based on a stereo-camera and visual odometry (VO) processing (see Fig. 2).

Fig. 2: One of the two cameras (green) and the Inertial sensor module (orange) that is placed in between the two cameras (Photo: LCM)
VO is a highly complex construct of image processing algorithms by which the orientation can be estimated from a sequence of stereo-image pairs. In order to be able to obtain near-real-time estimation, dedicated effort has been spent to optimize the complexity of the VO. Currently, the system provides three estimates per second.
The estimation of the orientation is substantially improved by the incorporation of inertial sensor signals (accelerometer, gyroscope). These
signals are combined with the output of the VO using a sensor fusion algorithm.
The current prototype system can be extended to a SLAM-system (Simultaneous Localization and Mapping) which allows for the generation of a map of the territory which the machine was passing.
Impact and effects
The system that has been developed in this project compensates for the deficiencies of the GPS in territories without line of sight to the respective satellites, and thus allows for the accurate navigation of agricultural machines with regard to their orientation.
Forestry workers are supported in their work and the forest soil is greatly protected.
Results of this work are going to be published at a conference and in an international journal.