Exoskeletons are wearable devices that allow the motion of human limbs with an enhanced strength. Such devices find applications in:
- Therapeutics: limb motion assistance and rehabilitation.
- Heavy work activities: enhancement of limbs’ load carrying capacity.
This collaborative project between Linz Center of Mechatronics and Institute of Machine Design and Hydraulic Drives at Johannes Kepler University aims to develop the next generation of hydraulically driven exoskeletons.
Our approach is based on a highly energy efficient and integrated digital hydraulic systems. Such hydraulic systems have several potential advantages:
- High force density (allows reduction of the mass and space of the actuation system)
- Easy energy recuperation (ensuring long battery life)
- Motion locking and damping capabilities
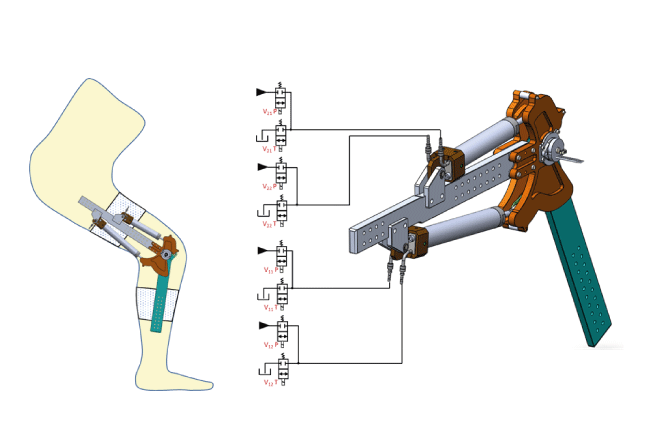
Knee exoskeleton
In this project, we have developed a novel design of digitally driven knee exoskeleton that uses a unique mechanism to satisfy the peak torque requirements during a typical gait cycle with a smaller hydraulic force.
The optimal kinematic structure along with a digital hydraulic actuation system promises superior energy efficiency, compactness, and controllability.
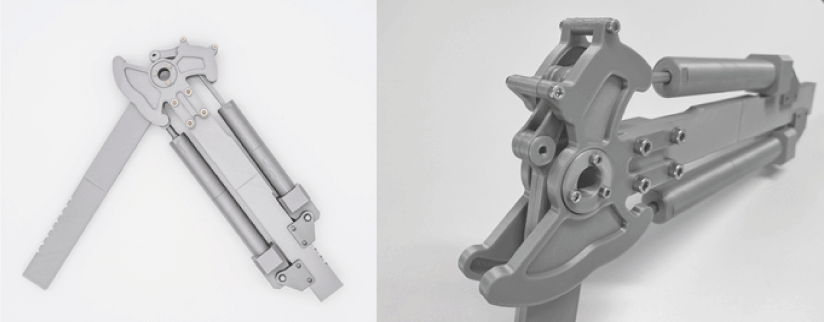 3D printed prototype
3D printed prototype
A prototype of this exoskeleton is currently being produced, and experimental tests will be conducted in near future.