Control engineering
Applications
- Model-based feedforward and feedback control of mechatronic systems
- Compensation of nonlinear actuator characteristics
- Stability and robustness investigations
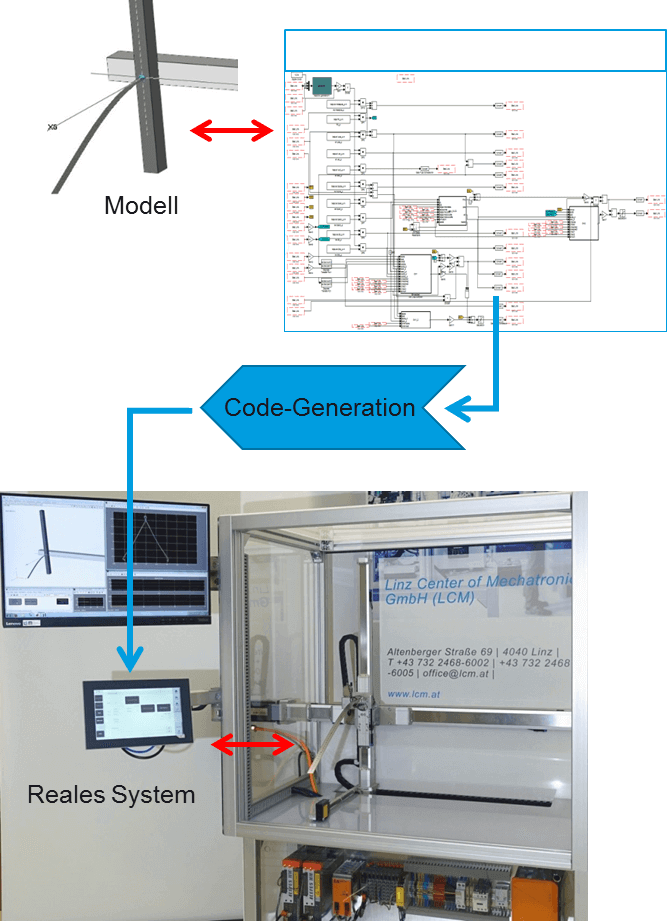
- Simulation of the closed loop control system and code generation for the automation system.
What‘s the benefit?
- Increased accuracy
- Improved system dynamics
- Higher reliability
- Easier adaptability
- Avoidance of vibration excitation