Einsatz von Robotik im Agrarbereich

Simulation, Optimierung und Prototyping
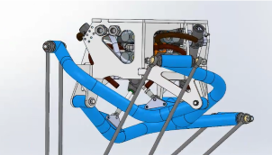
Die Landwirtschaft der Zukunft braucht effiziente, autonome Lösungen, die unter rauen Bedingungen zuverlässig funktionieren. In diesem Projekt wurde ein robotisches System entwickelt, das gezielt für die automatisierte Ernte und Unkrautbekämpfung ausgelegt ist.
Im Fokus standen neben Robustheit und Präzision auch eine kosteneffiziente Umsetzung sowie die Optimierung von Mechanik, Antrieb und Steuerung – bis hin zum funktionsfähigen Prototypen für den realen Feldeinsatz.
Herausforderung & Motivation
- Autonomes Ernten und Jäten
- Hohe Anforderungen an Robustheit
- Zugkräfte von 500–900 N
- Nutzlast von 7,5 kg
- Arbeitsfrequenz von 3 Hz
- Fokus auf kostengünstige Umsetzung
Vorteile für Kunden
- Kundenspezifisch angepasste Hydrodelta-Lösung
- Integriertes Konzept für Mechanik, Antrieb und Steuerung (inkl. Bahnplanung und Inverser Kinematik)
- Einsatzbereiter Funktionsprototyp

Dipl.-Ing., Dr. Markus Schörgenhumer, BSc
Business Area Manager Mechanics & Control
Weitere Referenzprojekte
Robotik im Agrarbereich
Einsatz von Robotik im Agrarbereich Simulation, Optimierung und Prototyping Die Landwirtschaft der Zukunft braucht effiziente, autonome Lösungen, die unter rauen…

Roboter für Rohrinspektion
Roboter für Rohrinspektion Autonome Inspektion von Tunnel-Drainagerohren Gemeinsam mit der ÖBB-Infrastruktur AG entwickelt die LCM GmbH den Tunnel Drainage Rover…

Autonome Müllentsorgung- und sortierung
Autonomer Abfall-Roboter LCM arbeitet gemeinsam mit der Firma Brantner an einem autonomen Robotersystem für das bedarfsgerechte Abfallmanagement im urbanen Bereich (z.B….
