Projekte

DuraPEM
DuraPEM Durability Assessment of PEM Electrolyser Stacks Eine der vielversprechendsten Technologien zur nachhaltigen Erzeugung von grünem Wasserstoff ist die Protonenaustauschmembran-Elektrolyse…

BABA Emissionen
BABA Emissionen BAtterie-BAsierter energiespeicher zur mobilen bereitstellung EMISSIONsfreier elektrischer ENergie Die Reduktion von Treibhausgasen (THG) ist ein vorrangiges Ziel auf…

Smart-Pump-Management Druckgussmaschine/Bühler
Weniger Verschleiß, mehr Effizienz: Nachrüstlösung für Druckgussanlagen im laufenden Betrieb Smart-Pump-Management optimiert Hydrauliksysteme in Bühler-Druckgussmaschinen Im Rahmen eines gemeinsamen Projekts…

Automatische Blechbiegemaschine
Digitaler Zwilling im Einsatz bei Salvagnini Automatische Blechbiegemaschine Wir haben einen digitalen Zwilling für prädiktive Wartung entwickelt. Mit ihm können…

TRINEFLEX
TRINEFLEX Umwandlung energieintensiver Industrieprozesse durch Integration von Energie-, Prozess- und Rohstoffflexibilität TRINEFLEX ist ein von der Europäischen Kommission im Rahmen…
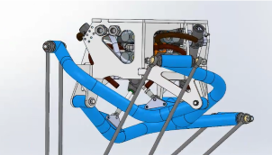
Robotik im Agrarbereich
Einsatz von Robotik im Agrarbereich Simulation, Optimierung und Prototyping Die Landwirtschaft der Zukunft braucht effiziente, autonome Lösungen, die unter rauen…

Roboter für Rohrinspektion
Roboter für Rohrinspektion Autonome Inspektion von Tunnel-Drainagerohren Gemeinsam mit der ÖBB-Infrastruktur AG entwickelt die LCM GmbH den Tunnel Drainage Rover…

Autonome Müllentsorgung- und sortierung
Autonomer Abfall-Roboter LCM arbeitet gemeinsam mit der Firma Brantner an einem autonomen Robotersystem für das bedarfsgerechte Abfallmanagement im urbanen Bereich (z.B….
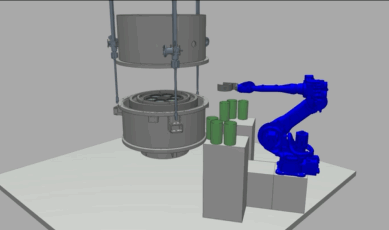
Virtuelles Testen
Virtuelles Testen für schnellere Entwicklungszyklen Virtuelle Testmethoden sind ein zentraler Baustein moderner Entwicklungsprozesse. Durch simulationsgestützte Tests auf Basis von CAD-Modellen…
