Schwingungsarme Roboterbewegung durch modellbasierte Trajektorienplanung
Schnellere Bewegungen von Roboterarmen ohne Oszillationen
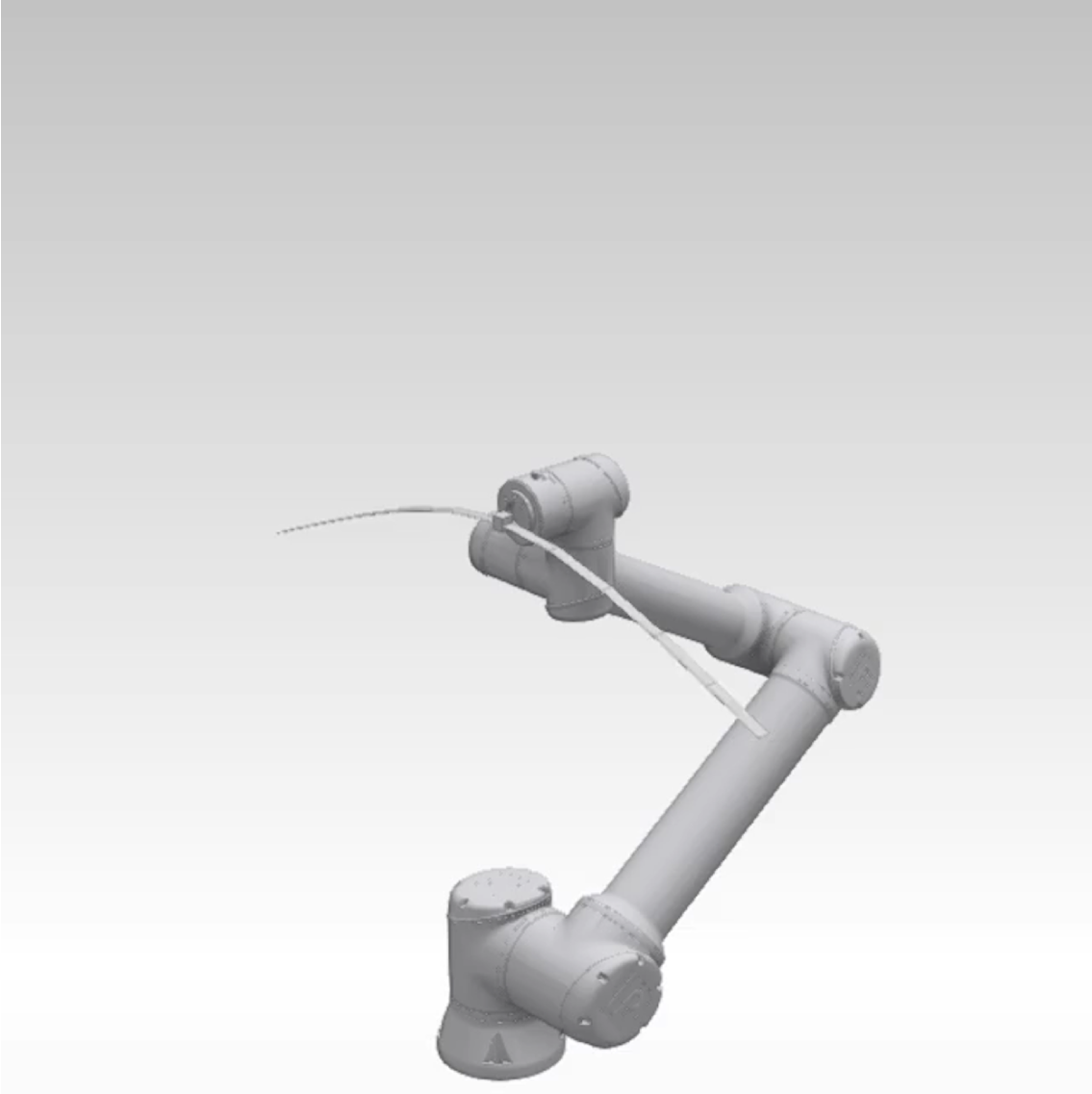
Durch die Berücksichtigung elastischer Eigenschaften von Bauteilen in der Bewegungsplanung lassen sich Schwingungen reduzieren und Taktzeiten verkürzen. Das Projekt zeigt dies exemplarisch an einem flexiblen Balken mit automatisiertem Code- und FMU-Export zur Simulation.
Ausgangslage und Anforderungen
- Schnelle Bewegungen
- Vermeidung von Schwingungen
Lösung und Nutzen
- Modellierung, Simulation, virtuelle Inbetriebnahme
- Trajektorienplanung mit definiertem Geschwindigkeitsprofil
- Schnelle Bewegungen ohne Oszillationen
- Erhöhter Durchlauf

Ihr Ansprechpartner
Dipl.-Ing., Dr. Markus Schörgenhumer, BSc
Business Area Manager Mechanics & Control