Low-vibration robot movement through model-based trajectory planning
Faster movements of robot arms without oscillations
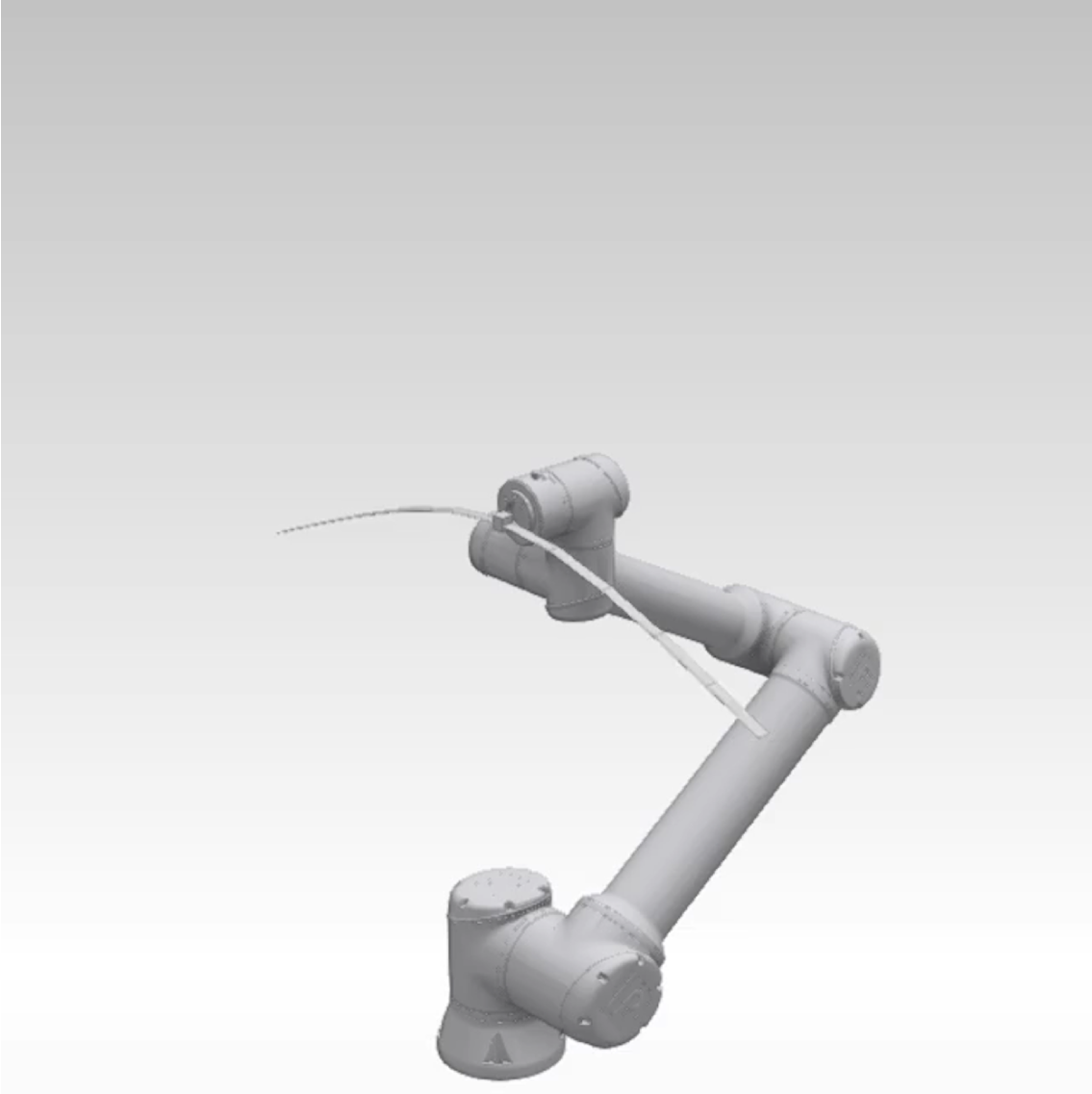
By taking the elastic properties of components into account in motion planning, vibrations can be reduced and cycle times shortened. The project demonstrates this using a flexible beam with automated code and FMU export for simulation as an example.
Initial situation and requirements
- Fast movements
- Avoidance of vibrations
Solution and benefits
- Modeling, simulation, virtual commissioning
- Trajectory planning with defined speed profile
- Fast movements without oscillations
- Increased throughput

Contact Person
Dipl.-Ing., Dr. Markus Schörgenhumer, BSc
Business Area Manager Mechanics & Control
Further reference projects
Automated measuring processes using cobots
Automated measuring processes using cobots Seamless combination of robotics and measurement technology A fully automated measurement process combines precise positioning,…
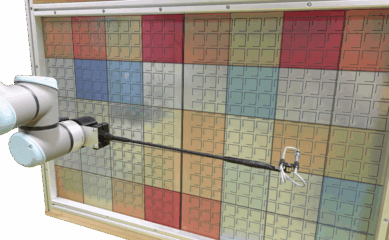
Automated sound intensity measurement
Automated sound intensity measurement Precise evaluation using sound pressure, sound intensity and sound power The system can be used to…
Self-sufficient sensor technology for rolling bearings
Self-sufficient sensor technology for rolling bearings Maintenance-free, wireless data acquisition Together with NKE Bearings, LCM has developed a technology that…
