Für die Wegepflege im Wald sind genaue Informationen über die Orientierung der Landmaschine erforderlich. Herkömmliche Navigation via GPS (Global Positioning System) erlaubt zwar die Positions- und Orientierungsbestimmung im Freilandgebiet, allerdings ist dazu eine Sichtverbindung zu mehreren Satelliten notwendig. Im Waldgebiet sind diese Sichtverbindungen aber meist nicht möglich. Das LCM hat ein System aufgebaut, das mittels einer Stereokamera und visueller Odometrie in Verbindung mit der Sensorfusion mit Signalen von Inertial-Sensoren die Orientierung im Outdoor-Bereich auch ohne GPS gut schätzen kann.
Orientierungsschätzung im Outdoor-Bereich ohne GPS
Im Forstbereich ist es nötig Waldwege in vorgegebenen Richtungen anzulegen, daher muss die genaue Orientierung der Landmaschine bekannt sein. Eine gängige Methode, um die Orientierung eines Fahrzeugs festzustellen ist das Heranziehen der Orientierungsinformation aus dem GPS (Global Positioning System), wozu eine Sichtverbindung zu mehreren Satelliten notwendig ist.
Im Waldgebiet ist diese Sichtverbindung in den meisten Fällen nicht möglich, daher müssen alternative Methoden herangezogen werden.
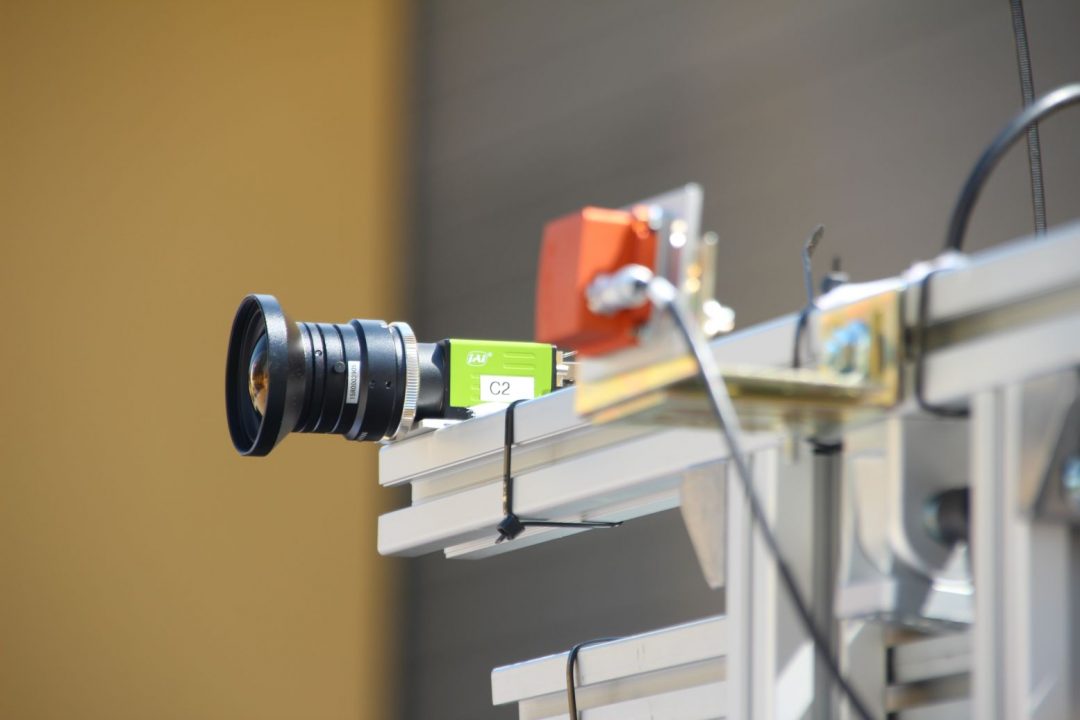
Die LCM hat verschiedene dieser Methoden evaluiert und in Zusammenarbeit mit dem Institut für Robotik der Linzer Johannes-Kepler-Universität einen Prototypen aufgebaut, der mittels einer Stereokamera und visueller Odometrie (VO) die Orientierung der Maschine schätzen kann (s. Abb. 1).

Abb. 1: Eine der beiden Kameras (grün) und Inertialsensormodul (orange), das genau zwischen den Kameras angeordnet ist. ( Foto: LCM).
Die VO ist ein hoch-komplexes Konstrukt von Bildverarbeitungsalgorithmen, die aus einander folgenden Stereokamera-Bildpaaren die Orientierung schätzt. Um eine echtzeit-nahe Anwendung der Orientierungsschätzung im Wald zu ermöglichen, wurde viel Einsatz in die Optimierung der Komplexität der VO gesteckt. Derzeit werden etwa drei Orientierungsschätzungen pro Sekunde gerechnet.
Die Orientierungs-Schätzung wird durch die Verwendung von Inertialsensor-Signalen (Beschleunigungssensoren und Gyroskope) wesentlich verbessert. Diese Signale werden über eine Sensor-Fusion mit jenen der VO verknüpft.
Dieses System kann zu einem SLAM-System (Simultaneous Localization and Mapping) erweitert werden, das die Erstellung einer Karte jenes Gebietes ermöglicht, in dem die Landmaschine fuhr.
Wirkungen und Effekte
Mit dem in diesem Projekt entwickelten System ist es möglich, die Nachteile des GPS-Systems in Gebieten ohne Satellitensichtverbindung zu kompensieren und Waldwege sehr genau zu setzen und abzufahren.
Das System erleichtert Forstpersonal die Arbeit und verhindert unnötiges Befahren von Waldboden mit Landmaschinen.
Die Resultate dieses Projektes werden derzeit in je einer Konferenz- und einer Journal-Publikation veröffentlicht.