
Ziel des Projektes ist die Entwicklung eines kostengünstigen, modularen, zweibeinigen Roboters. Aufgrund der Komplexität des Systems musste dabei ein sehr hoher Wert auf eine robuste und stabile Regelung der einzelnen Komponenten und insbesondere des Gesamtsystems gelegt werden. Soweit möglich wurde auf industrielle Komponenten zurückgegriffen, jedoch mussten einige Komponenten speziell für den Roboter entwickelt werden. Es entstand ein Gehroboter der sich stabil in teilweise unbekannten Umgebungen fortbewegen und einfache Aufgaben selbstständig erledigen kann.
Ein Roboter für alle Fälle – Die Zukunft der Servicerobotik
Wer kennt sie nicht, die Vision vom Sofa aus einem Roboter dabei zuzusehen wie er die Hausarbeit erledigt. Was in vielen Science Fiction Filmen ohne viel Mühe funktioniert, versuchen Forscher weltweit in die Realität umzusetzen.
Auch dieses Forschungsprojekt beschäftigt sich zumindest in der Grundidee mit diesem universalen „Haushalts“-Roboter. Wie ein solcher Gehilfe nun aussehen mag, darüber lässt sich streiten, sich bei der Entwicklung der Kinematik an der Biologie des Menschen zu orientieren mag aber vermutlich kein Fehler sein.
Ziel des Projektes war die Entwicklung eines kostengünstigen Roboters mit einem kinematischen Aufbau, welcher sich am menschlichen Bewegungsapparat orientiert, also zwei Beine besitzt. Wie man sich nun denken mag, stellen gerade diese zwei Beine eine enorme Herausforderung an die Regelung des Roboters. Nicht nur die, im Vergleich zu konventionellen Robotern, sehr hohe Anzahl an Freiheitsgraden, sondern vor allem die fehlende Fixierung zu seiner Umgebung müssen für einen stolperfreien Gang besonders berücksichtigt werden.
Eine Frage der Regelung
Nachdem die Kinematik und die Antriebe festgelegt waren, beschäftigte sich der Hauptteil des Projektes mit der Regelung des zweibeinigen Ganges und einigen darauf aufbauenden Funktionen, etwa dem selbstständigen Planen seiner Schritte.
Sehr viel Energie floss in die Stabilisierung des Ganges des Roboters. Wie auch bei uns Menschen waren vor allem die ersten Schritte ein besonderer Moment. Doch Vieles hat sich seither getan. Die Sensorik wurde vielfach überarbeitet, so ist der Roboter nun etwa in der Lage die Kontaktkräfte und Momente in den Sprunggelenken zu messen. Ebenso besitzt er einen inertialen Orientierungssensor, welcher dem Roboter, ähnlich unserem Mittelohr, seine Orientierung im Raum mitteilt.
All diese Sensordaten werden in einem zentralen Computer, welcher sich im Oberkörper des Roboters befindet, gesammelt und dazu verwendet, den Roboter so zu bewegen, dass er nicht bei der kleinsten Unebenheit ins Stolpern gerät.

Abb. 1: Der zweibeinige Roboter Awaro
Diese Regelungsalgorithmen basieren größtenteils auf aufwendigen Mehrkörpermodellen. Vor allem aufgrund der sehr „schweren“ Beine ist eine Reduktion auf einfachere Modelle nicht immer zweckmäßig, da hier meist der Einfluss der einzelnen Gelenke vernachlässigt wird.
Die im Zuge dieses Projektes neu entwickelten Algorithmen zeichnen sich gerade durch diese komplexen Modelle und die trotzdem relativ geringen Rechenaufwände aus.
Wirkungen und Effekte
Zwar ist es bis zur Erfüllung der eingangs erwähnten Vision noch ein weiter Weg, die Erkenntnisse dieses Projektes konnten jedoch einen wesentlichen Beitrag leisten.
Auch wenn der universale Gehilfe noch etwas in der Zukunft liegt, konnten viele in diesem strategischen Projekt gewonnene Erkenntnisse erfolgreich in anderen Multifirm Projekten umgesetzt werden.
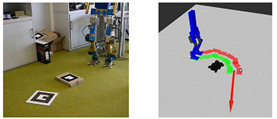
Abb. 2: Dank des integrierten Schrittplaners findet der Roboter automatisch seine Schritte zum Ziel
Alle im Rahmen dieses Projektes entwickelten Methoden und Algorithmen für die Stabilisierung, Identifikation und der Entwurf des Roboters wurden vor einem internationalen Fachpublikum präsentiert und veröffentlicht.
Kontakt und Informationen
K2-Zentrum, ACCM
Linz Center of Mechatronics GmbH Projektkoordination
Altenberger Straße 69, A-4040 Linz Prof. Michael Krommer
T +43 (0) 732 2468-6002 Dr. Manfred Nader
E office@lcm.at, www.lcm.at
Projektpartner
| Organisation | Land |
| Institut für Robotik, Johannes Kepler Universität Linz | Österreich |