
The aim of this project was the development of a low-cost, modular, two-legged robot.
Due to the complexity of the system, lots of effort was put into a robust and stable control of the individual components and in particular of the whole system. Industrial components were used as far as possible, but some components have been tailor made for the robot system. The result is a sophisticated walking machine that is able to maneuver in partially unstructured environments and can perform simple autonomous tasks.
A robot for every case – The future in service robotics
Who doesn’t know the vision lying on the sofa watching a robot doing the housework? While this has often been seen in Science Fiction movies, researchers all over the world still try to turn this into reality.
Also this research deals at least with the idea of creating such a universal household robot.
It is hard to tell how such an assistant will look like in the future, but it is definitely a good idea to be inspired by the nature and to build a human like robot.
The aim of the project was to develop a low-cost robot with a kinematic structure, which is based on the human locomotion system and has two legs.
One can imagine that especially these two legs are an enormous challenge regarding the control of the robot.
Compared to conventional manipulators it is not just the high degrees of freedom but most of all the unilateral contact of the robot to the environment, which has to be considered for walking without stumbling.
A matter of control
After the kinematics and the drives were set, the main part of the project dealt with the control of the biped walking and some additional features, such as the integrated planning of footsteps or the voice output.
Lots of effort was put into the stabilization of the gait and especially the first steps of the robot were a special moment.
Since then lots of progress has happened. For example the sensor system of the robot has been widely revised, so that the robot is now able to measure the contact forces and torques at its ankles.
Additionally an inertial measurement unit has been placed at the robots upper-body. This allows the robot to sense its orientation in space.
All these sensed physical quantities are collected by the central control unit in the upper-body and used to calculate trajectories for the single joints, so that the robot does not tip over at the smallest pebble.

Fig. 1: The biped robot Awaro
The control algorithms are mainly based on complex multi-body models. Especially due to the very “heavy” legs, a reduction to simpler models is not always practicable, as they mostly neglect the influence of the individual joints.
The algorithms, developed during this project, are distinguished by making use of these complex models while still keeping the computational effort relatively low.
Impact and effects
While it is still a long way till such universal household robots will be part of our daily life, the results of this project are an important step towards this goal.
Nevertheless many insights, gained in this strategic project, were successfully implemented in other multi-firm projects.
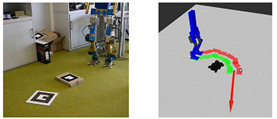
Fig. 2: The integrated step planner allows the robot to plan its path towards the desired target position
All methods and algorithms for the stabilization of the gait, for the identification or the development of the robot have been published and presented to international experts.
Contact and information
K2-Center, ACCM
Linz Center of Mechatronics GmbH Project coordinator
Altenberger Straße 69, A-4040 Linz Prof. Michael Krommer
T +43 (0) 732 2468-6002 Dr. Manfred Nader
E office@lcm.at, www.lcm.at
Project partners
| Organisation | Country |
| Institute of Robotics, Johannes Kepler University Linz | Austria |