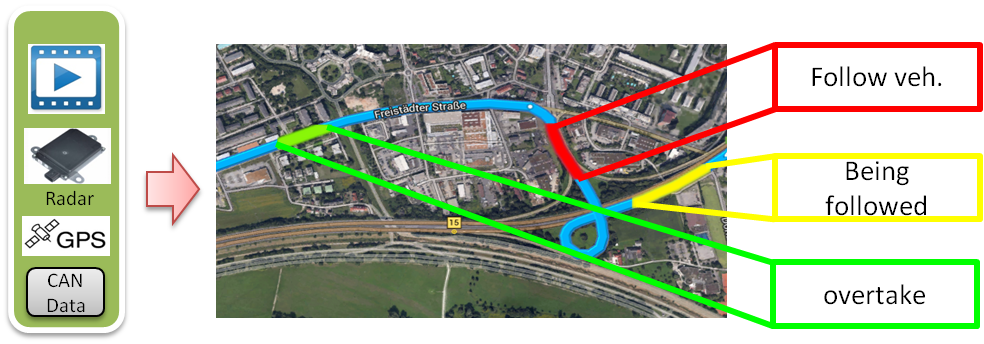
In the framework of the MFP “Adaptive optimal control for mechatronical systems under unknown operating conditions” an approach has been developed and validated experimentally to determine suitable testing conditions for autonomous or semi-autonomous functions or vehicles. The method is based on a segmentation of a road profile (see figure) and of an on-line analysis of the actual traffic conditions.
The work has been realized in cooperation between the JKU Institute for Design and Control of Mechatronical Systems and the Politecnico di Milano, Department of Electronic- Information- and Bioengineering and has been based on a test vehicle (BMW320) equipped with a Continental radar sensor, two stereo cameras as well as an interface to the CAN-bus of the vehicle.
The behavior of other traffic participants (velocity, relative distance, acceleration) is measured using the sensors mentioned above which allows for this segmentation of a test drive to specific driving maneuvers like overtaking, following etc. Furthermore, combining the measurements and the resulting segmentation, it has become possible both to determine critical driving situations which are important for safety testing, as well as probability distributions for a specific driving maneuver, e.g. overtaking. Such information is essential for evaluating the ecological and economic impact of a specific advanced driver assistant system.
Impact and effects
The results of the segmentation and the analysis of probability distributions for specific driving maneuvers offer an important and promising basis for developing tools for testing and evaluating advanced driver assistant systems and autonomous driving strategies in terms of safety but also performance and efficiency.