Control of flexible structures
Handling systems must move as quickly as possible from the starting point to the finishing point. Lightweight design concepts help to make systems faster, since reducing the mass in motion also reduces the energy required for acceleration and deceleration of the mass. However, reducing the weight of the construction often increases the tendency to vibration. The LCM demonstrator presented here takes the example of a highly vibratory system to demonstrate how flexible structures can be moved precisely.

Task
Moving a flexible boom precisely along a given path is not an easy task when highly dynamic movements are involved. The challenge is to avoid vibrations and to ensure a corresponding level of robustness. As shown in the video, this is no longer possible with conventional control concepts. Using modern methods, however, elasticities in the mechanical structure can be considered in the control design, such that vibrations are avoided and movements can be carried out faster.
Control concept
The implemented model-based control concept is based on a two degrees of freedom scheme combining feedforward control (flatness-based) with closed-loop control (passivity-based). Based on a mathematical model, the feedforward control calculates the required drive torques for the desired path. If the model corresponds to the real system, applying these drive torques results in vibration-free movement. In reality, however, there are always uncertainties and inaccuracies in the model. These can be compensated by using a controller. The controller only needs to compensate for the deviations between the model and reality. The feedforward control thus avoids vibrations by taking the elasticities into account directly, while the controller compensates residual vibrations due to model uncertainties (e.g. friction) and thus ensures the desired level of robustness.
Digital twin
A virtual copy of the handling system, a so-called digital twin, operates in parallel to the real structure in real time on an industrial PC. The digital twin is implemented with the HOTINT multi-body simulation software which guarantees a precise reproduction of the real system dynamics including the characteristics of the flexible boom. This allows virtual commissioning in the sense that the automation hardware is directly coupled to the digital twin. The advantage of the virtual commissioning method is that the final automation system (software and hardware) can be directly tested and optimised in advance. As a result, not only the commissioning risk, but also the commissioning time on the real machine can be significantly reduced.
Structure of the demonstrator
The demonstrator was built with standard industrial components. The measurement variables required for control include the positions and speeds of the two axes. In addition, strain gauges located close to clamped support of the flexible boom allow the clamping torque to be taken into account in the controller. The laser distance sensor shown in the figure is only used to evaluate the accuracy with which the desired movement is carried out.
Results and benefits
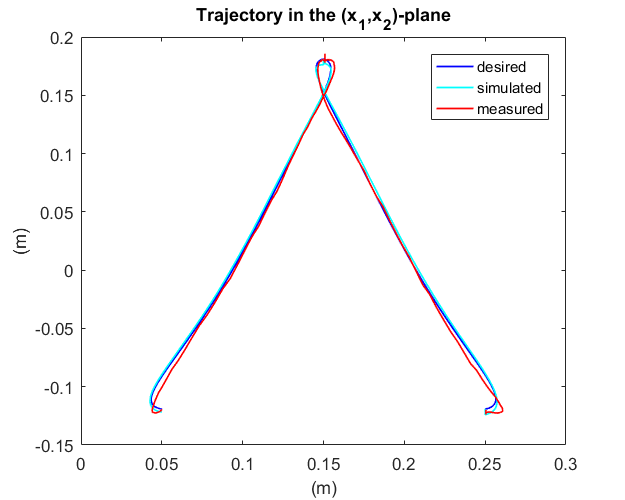
As shown in the video, the control concept presented here makes it possible to implement precise highly dynamic point-to-point movements. A comparison between the specified and measured paths is shown in Figure 2. In addition to the excellent accuracy, the travel speed can be increased. Compared to conventional control, this reduces the point-to-point transition time by 32%.
FACT BOX
- Highly flexible boom with a length of 0.5 m (cross section 18 x 0.45 mm) and a static deflection of 0.18 m
- Direct consideration of the boom elasticity in the control concept
- Precise positioning despite high friction of the spindle-driven linear axes
- Flatness-based feedforward control with passivity-based closed-loop control for vibration-free and highly dynamic point-to-point movement
- Digital twin
- Reduced transition times – point-to-point movement 32% faster